SCN-01
Autonomous Sanitation
清洁环卫
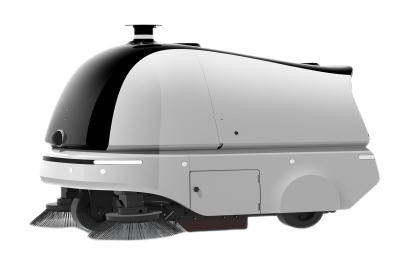
面向园区、商场与城市公共空间,视觉大脑精准识别动态行人、微小垃圾及地面材质,支撑自主避障、动态路径规划与精细化边界识别。
Semantic Seg
语义分割识别地面类型
Dynamic Obstacle
毫秒级行人轨迹预测
LiDAR Fusion
Auto-Path
Edge AI
以 KHP-net 全景分割世界大模型为核心,构建集视觉感知、目标识别、空间理解与智能推理于一体的视觉大脑,为多类型机器人平台提供"看得清、看得懂、会判断、能行动"的端到端能力。
堃华科技(广州)有限公司成立于 2025 年 5 月,由中国工程院王耀南院士团队及人工智能、机器人领域行业精英发起,专注具身智能领域。
以端侧 AI 与边缘计算为技术基础,提供高可靠、低时延、强鲁棒性的机器人视觉能力,灵活适配清洁环卫、空间服务、智能制造、军事装备等多类型机器人平台。

KHP-net · 多模态融合 · 端侧 AI · 数据闭环
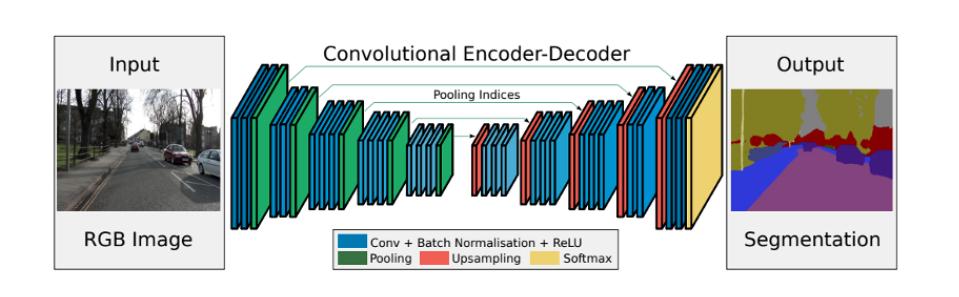
采用卷积编码器-解码器架构,通过可变空洞率卷积模块实现多尺度感受野,在复杂场景下输出像素级的全景分割结果。
精准区分地面材质、障碍物边界、动态人体及复杂工业零部件。
网络拓扑深度优化,复杂环境下仍可保持毫秒级推理响应。
打破单一传感器局限,融合 RGB、深度与点云数据,构建全天候、全场景鲁棒的感知能力。
高分辨率颜色与纹理提取,支撑精细的物体分类与表面瑕疵识别。
结构光 / ToF 深度成像,毫米级空间建模,支撑精准避障与 3D 理解。
360° 环境扫描,极端光照与开阔场景下仍保持远距离感知与定位精度。
通过模型量化、剪枝与蒸馏技术,KHP-net 部署于主流移动 GPU 与国产端侧芯片,不依赖云端即可完成毫秒级推理,保障机器人在无网环境下的安全与实时性。
四大场景 · 全链路赋能 · 适配多形态机器人
面向园区、商场与城市公共空间,视觉大脑精准识别动态行人、微小垃圾及地面材质,支撑自主避障、动态路径规划与精细化边界识别。
语义分割识别地面类型
毫秒级行人轨迹预测

赋能新零售、政务大厅与展厅场景。视觉大脑不仅识别访客身份,更解析复杂社交语义,支撑人脸识别、手势交互、骨骼追踪等多模态人机交互底座。
毫秒级特征点提取,适配不同光影。
多模态感知驱动灵巧手抓取递送。

工业 4.0 时代视觉即生产力。堃华提供微小缺陷检测、高精度零部件定位及线边物流的视觉引擎,2D/3D 视觉融合实现亚毫米级识别。
微裂纹与划痕识别。
引导机械臂亚毫米抓取。
叉车 / AGV 实时避障。

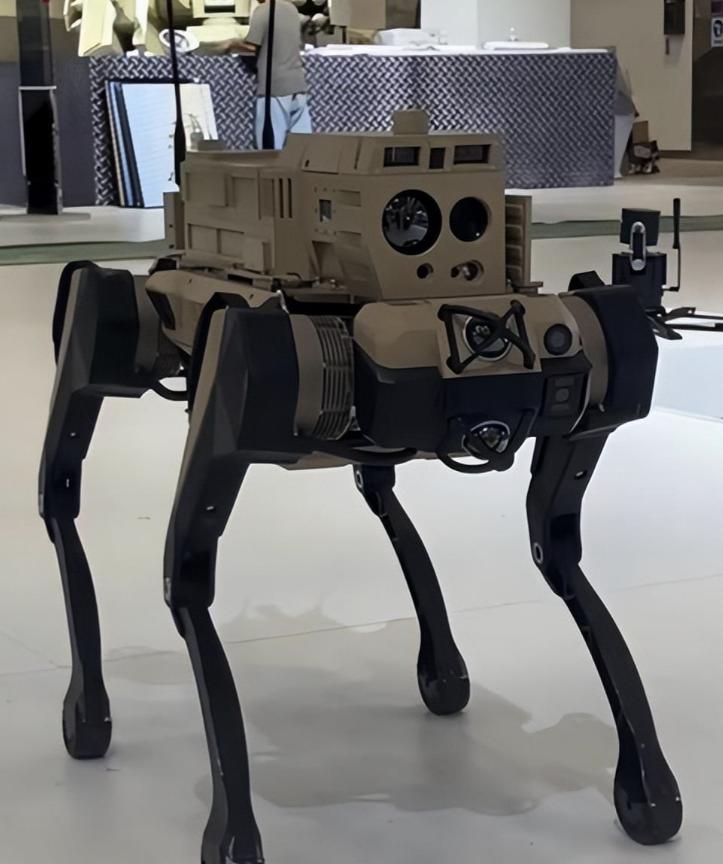
极端、非结构化环境下,视觉大脑支撑无人战车与机械狗在山地、废墟、巷战等全地形中的自适应感知。低时延边缘计算保障远程高保真图传与战术协同。
全地形自适应感知。
多传感器协同决策。
低延迟高保真图传。
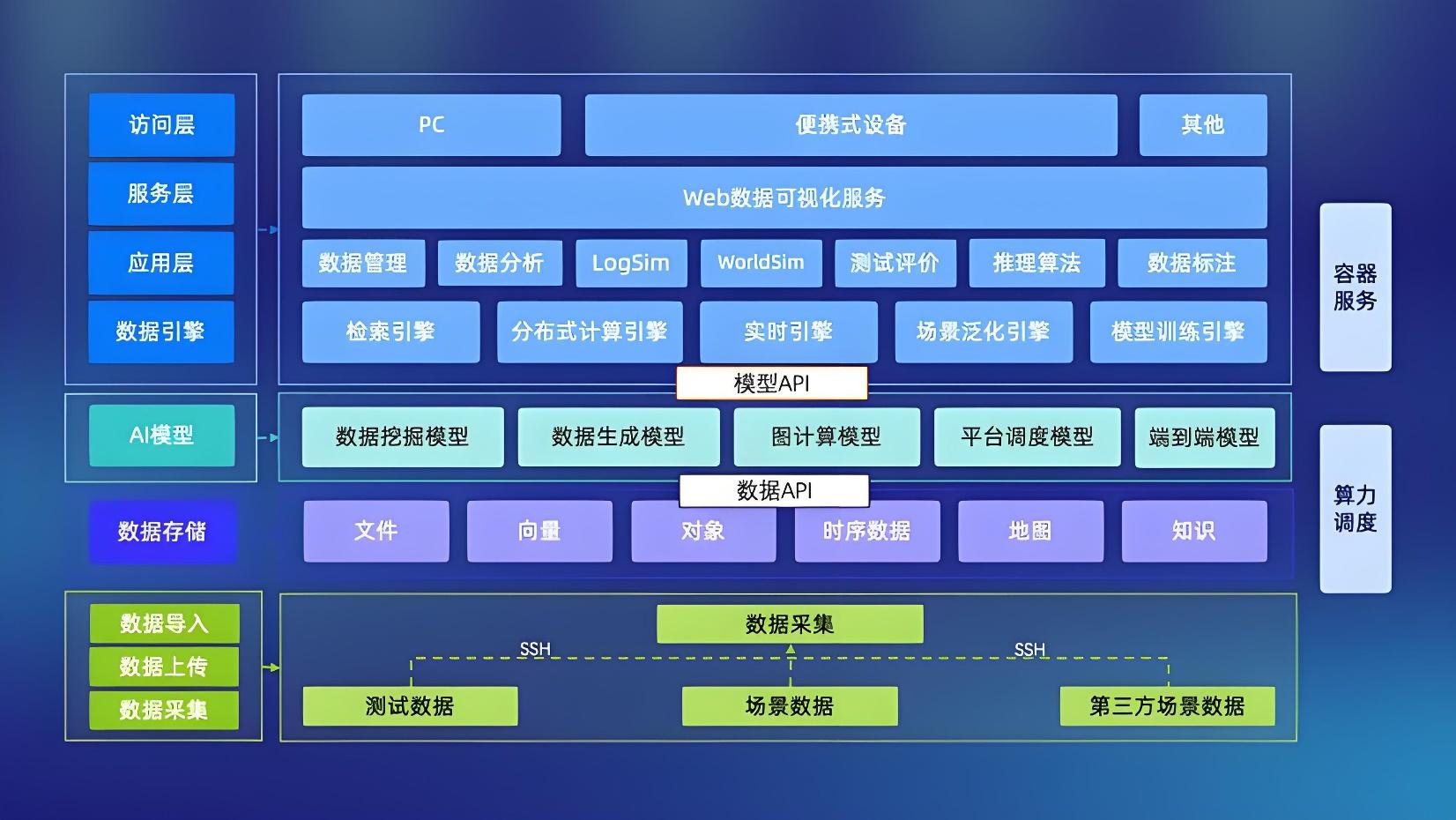
RoboSense 机器人数据闭环 · "越用越聪明"的自进化系统
RGB / 深度 / LiDAR 传感器同步接入
AI 自动过滤冗余与低质量数据
预训练模型辅助 + 专家审核
KHP-net 视觉大模型持续调优
边缘算力适配,毫秒级感知
覆盖清洁、制造、服务、军事四大领域的数据采集网络,多传感器融合实现机器人运行环境的全维度感知与记录。

AI 算法对海量原始数据进行智能筛选与质量评估,剔除低质量样本,确保进入训练流程的每一帧都具备最高学习价值。
自研新一代标注平台,融合预训练模型智能预标与专家级人工校验,支持 2D 全景分割、3D 目标检测等多种标注任务。

基于高质量标注数据训练 KHP-net 视觉大模型,分布式训练架构与持续学习机制驱动模型性能持续增强。
助力机器人厂商快速构建自主环境感知与理解能力
机器人运行数据闭环回流,驱动模型在长尾场景中不断优化。
新行业场景下,从数据采集到模型可用最快仅需 7 天。
本地私有化部署,保障工业与军事级别的数据隐私。
云端大规模算力训练,端侧极致功耗比推理适配。